Ultra-Lightweight DEA Drone Flight Controller Development
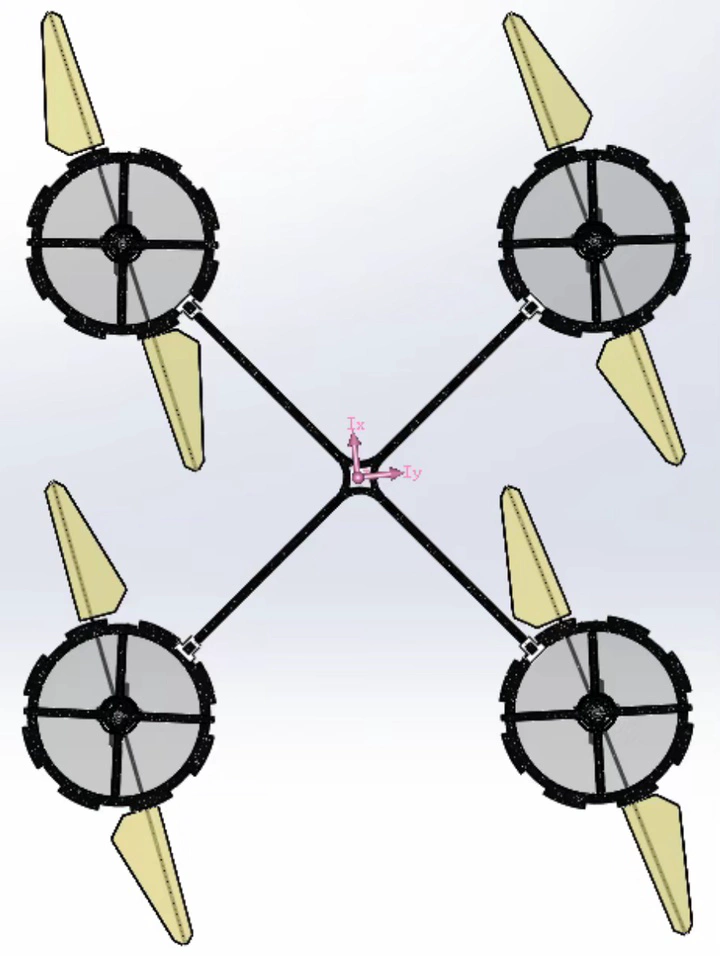
Since March 2025, I have been collaborating with Professor Huichan Zhao to develop an innovative flight control system for an ultra-lightweight drone utilizing soft artificial muscles. The drone weighs only 23 grams and employs Dielectric Elastomer Actuators (DEA) as its primary propulsion mechanism.
Project Overview
This research focuses on overcoming the unique challenges of controlling drones powered by soft artificial muscles. Unlike traditional motor-based systems, DEA actuators offer silent operation, high energy efficiency, and biomimetic movement patterns, but require specialized control approaches due to their nonlinear electromechanical properties.
Flight Controller Development
I am designing a custom flight controller architecture specifically optimized for DEA-driven drones:
- Implemented real-time control algorithms accounting for DEA hysteresis and viscoelastic behavior
- Developed adaptive PID controllers with gain scheduling for voltage-to-strain conversion
- Integrated sensor fusion for IMU data processing with Kalman filtering
Simulator Implementation
To enable safe testing and rapid prototyping, I built a physics-based simulator featuring:
- High-fidelity DEA actuator models with electromechanical coupling dynamics
- Aerodynamic modeling for ultra-lightweight frames
- Real-time visualization of drone state and actuator deformation
Technical Challenges
The project addresses several key research challenges:
- Nonlinear Control: Compensating for DEA’s voltage-dependent strain response and creep effects
- Weight Constraints: Implementing full control stack within 23g total system mass
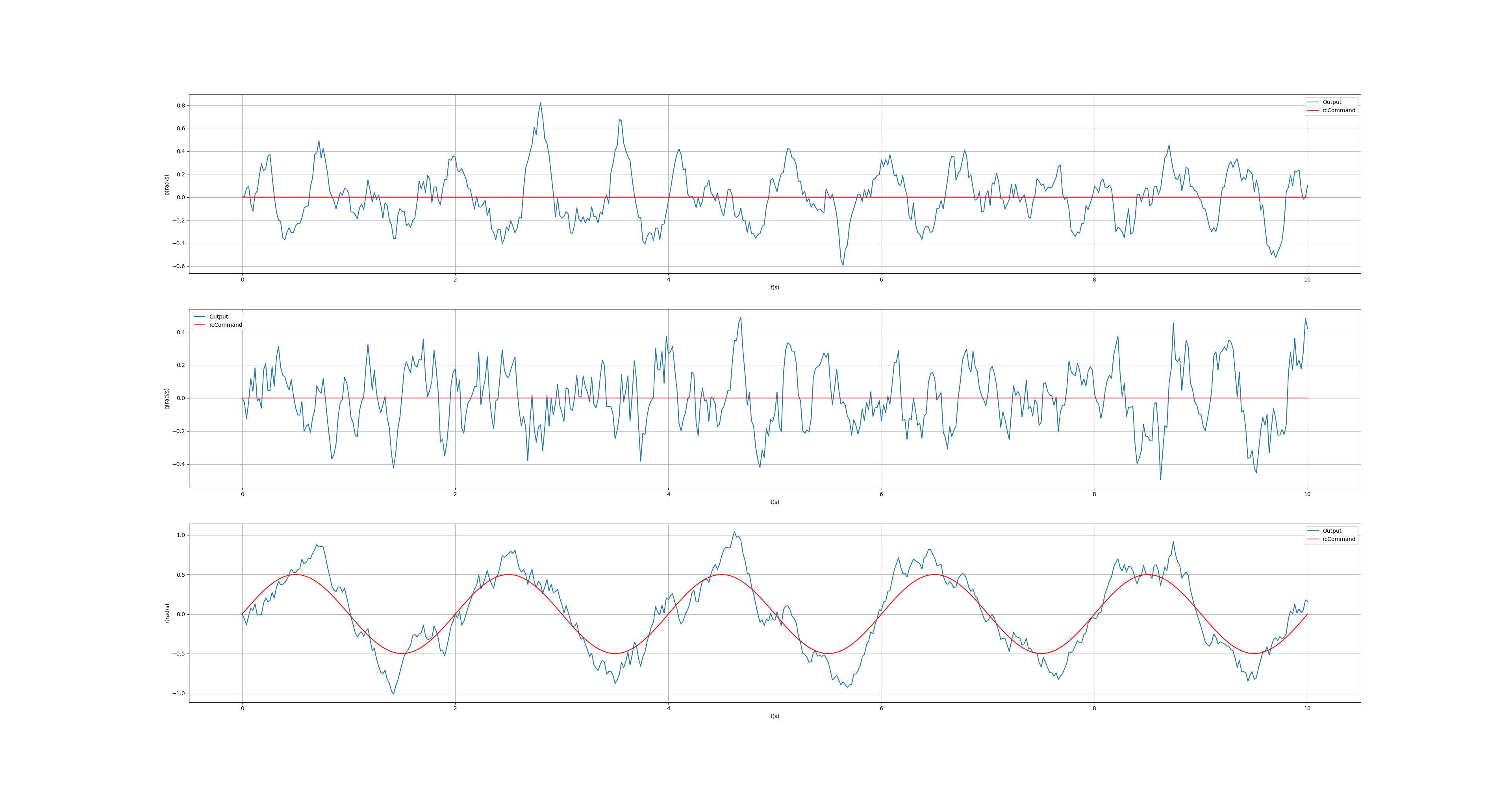
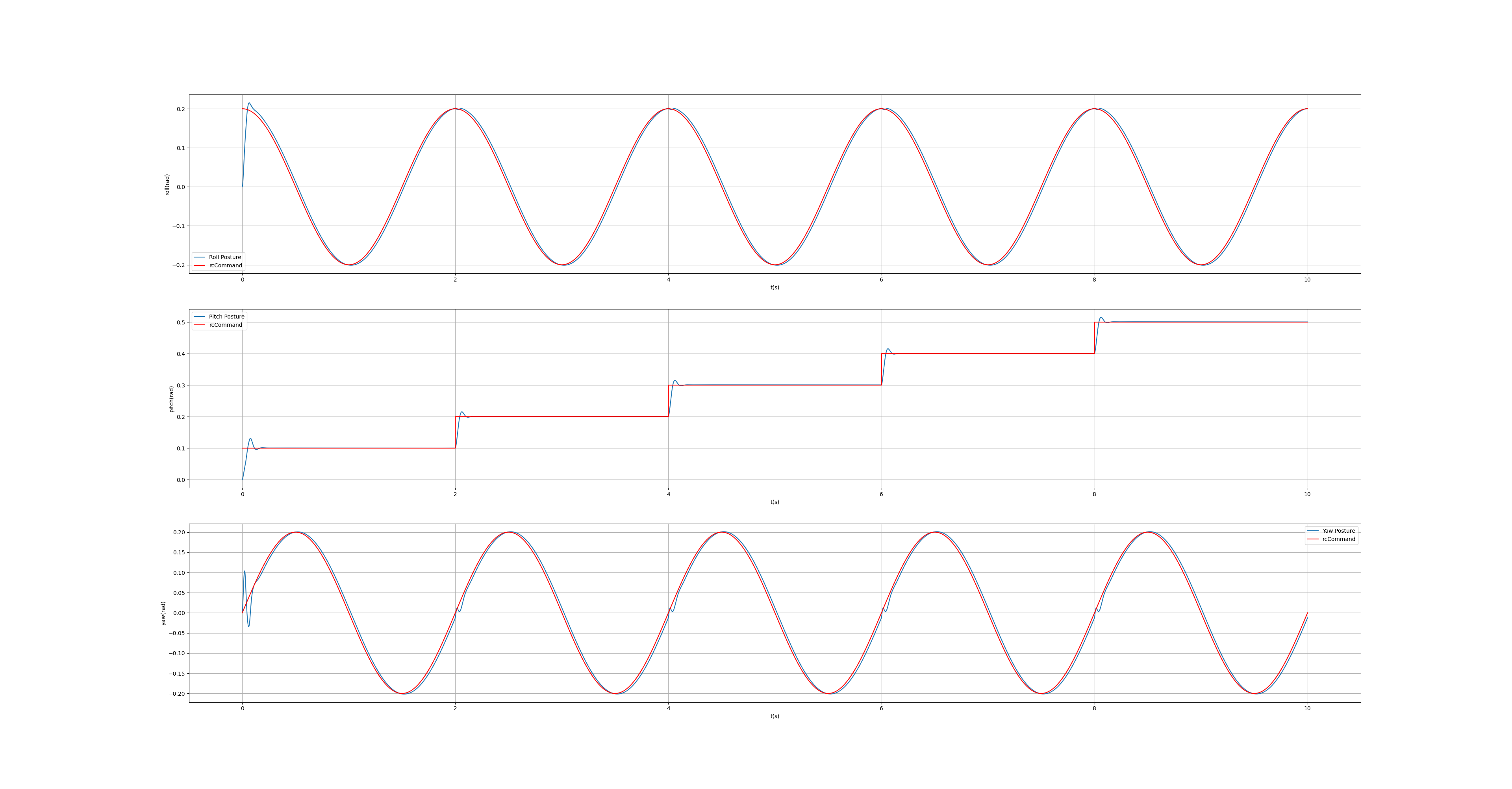
Current Progress
As of today, we have achieved:
- Successful closed-loop attitude control in simulation with <5° steady-state error
- Preliminary flight tests in mujoco simulation, demonstrating basic stabilization capabilities
[Project repository link to be added upon publication]