Research on Dual-arm Collaborative Robot Working Space
From Febuary till December, 2024, I joint a team of four to work on a dual-arm collaborative robot system.
Under assistant professor Ze Wang’s guidance, I mainly focus on finding the work space of the robot.
Research Overview
Advisor: Ze Wang, Professor and Assistant Dean at School of Mechanical Engineering, Tsinghua University
The main focus of this study is to use dual-arm collaborative robot system to enhance the stiffness while working. Most dual-arm system do not have a rigid connection between the two arms. We are developing a system which have a rigid connection, which is the main innovation.
We designed three different configuration for the dual-arm system, as shown below: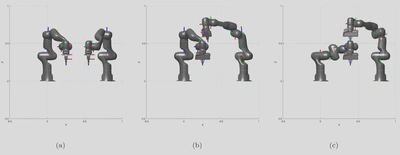
Motion Trajectory Planning Research
- Summarized current research progress on motion trajectory planning of two-arm collaborative robots.
- Identified key areas for improvement and proposed innovative solutions.
End Effector Stability Enhancement
- Improved the stability on the end effector of a two-arm collaborative robot.
- Implemented techniques to ensure precise and consistent performance.
Workspace and Collision Analysis
- Analyzed the workspace and constraints of the robot.
- Developed strategies to prevent collisions between the two arms of the collaborative robot.
Robot Configuration Design Collaboration
- Collaborated with a team of four to design different robot configurations.
- Focused on improving stiffness and overall structural integrity of the robots.
My Contribution
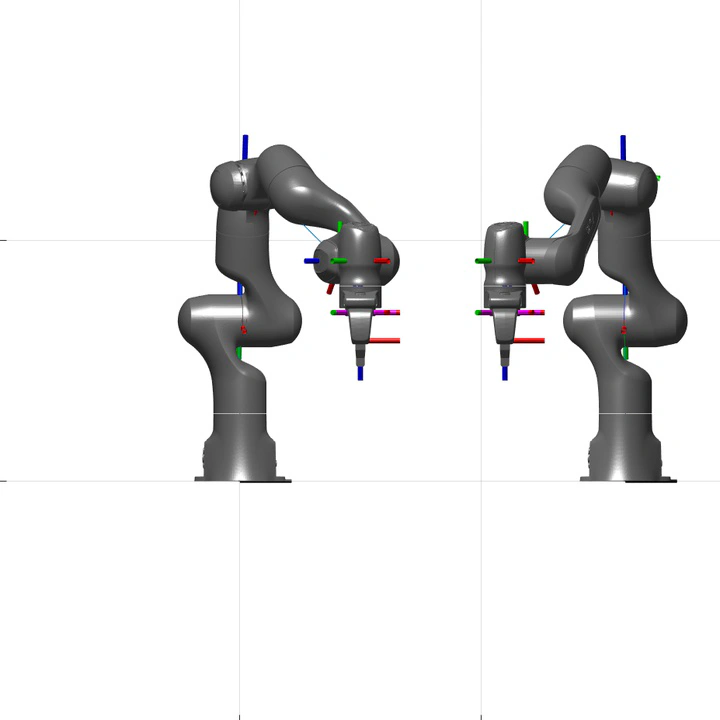
I mainly focus on the working space of this system. Unlike most dual-arm robot system, ours need to consider the problem of two robotic arms interfering with each other.
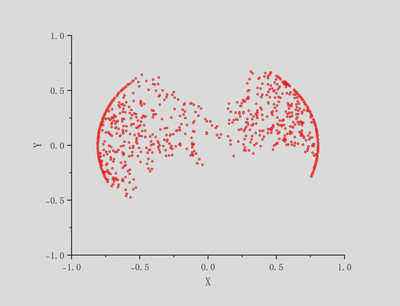
Using MATLAB to do simulating work, I developed a programme using Monte Carlo method to find the available workspace.
One example is shown below: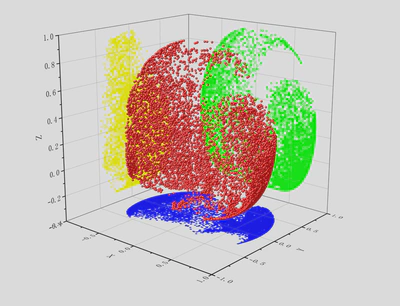
We can see the slice on the plate of z = 0.2: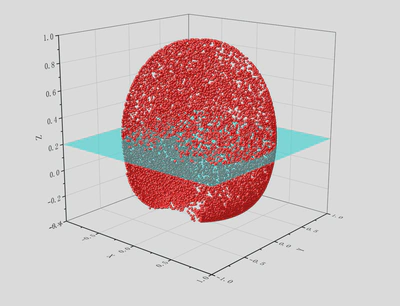
Click here to find the original code