7-DOF Robotic Arm Motion Planning Algorithm Development for Humanoid Robots
Jul 15, 2025· ·
1 min read
·
1 min read
Zilin Chen 陈子林

Project Overview
Core Objective: Develop motion planning algorithms for Xiaomi’s 7-DOF humanoid robotic arm, enhancing motion precision (<0.3mm error), stability, and robustness against payload variations.
Technical Framework:
- Theoretical Basis: DH parameters, inverse kinematics (IK), trajectory interpolation
- Toolchain: MuJoCo simulation, C/Python co-development
- Validation Protocol: Dual verification system complying with ISO 9283 standards (positioning accuracy, path repeatability)
Key Technical Achievements
- Kinematics Algorithm Development
- Forward Kinematics: Established DH-based coordinate transformation model with 0.1mm calculation precision
- IK Solver Optimization:
- Developed universal inverse kinematics interface auto-adapting to URDF configurations
- Hybrid numerical-geometric solution reducing end-effector positioning error to 0.3mm
- Trajectory Smoothing: Implemented Kalman filtering with B-spline interpolation, decreasing joint velocity fluctuations by 30%
- Simulation-Physical Validation
- MuJoCo Environment: Calibrated dynamic parameters (gravity compensation, joint friction models) matching h1_2 hardware specs
- Hardware-in-the-Loop Validation: <1.5% deviation in 50 test trajectories between simulation and physical tests
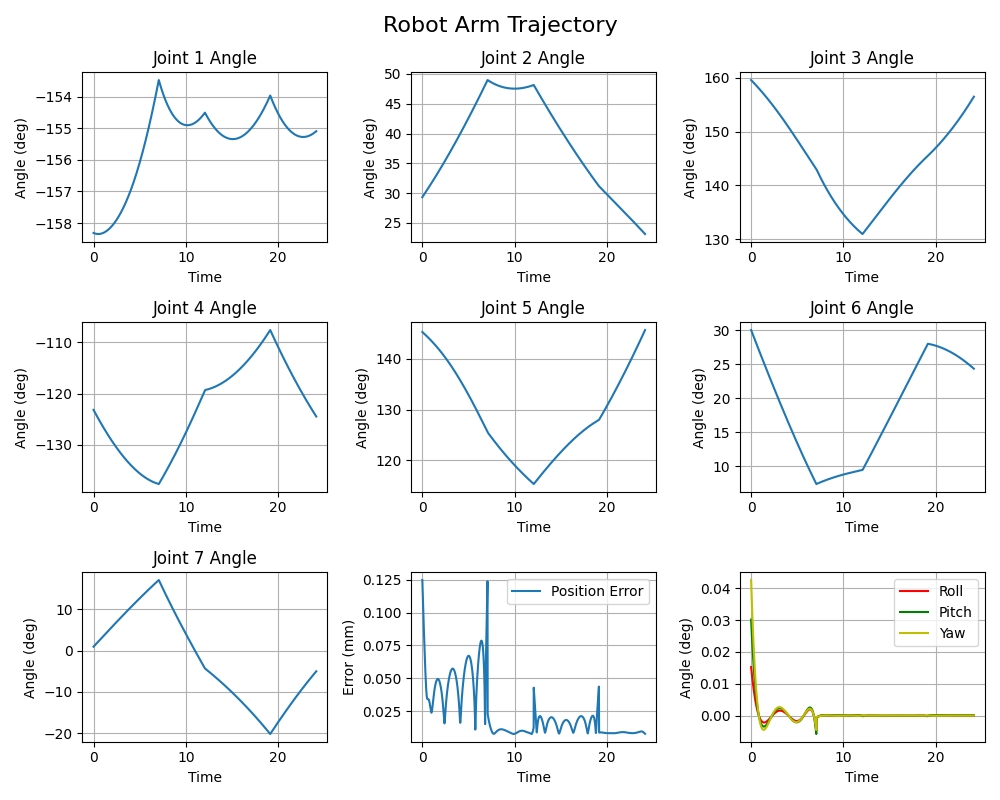
trajetory planner with filter
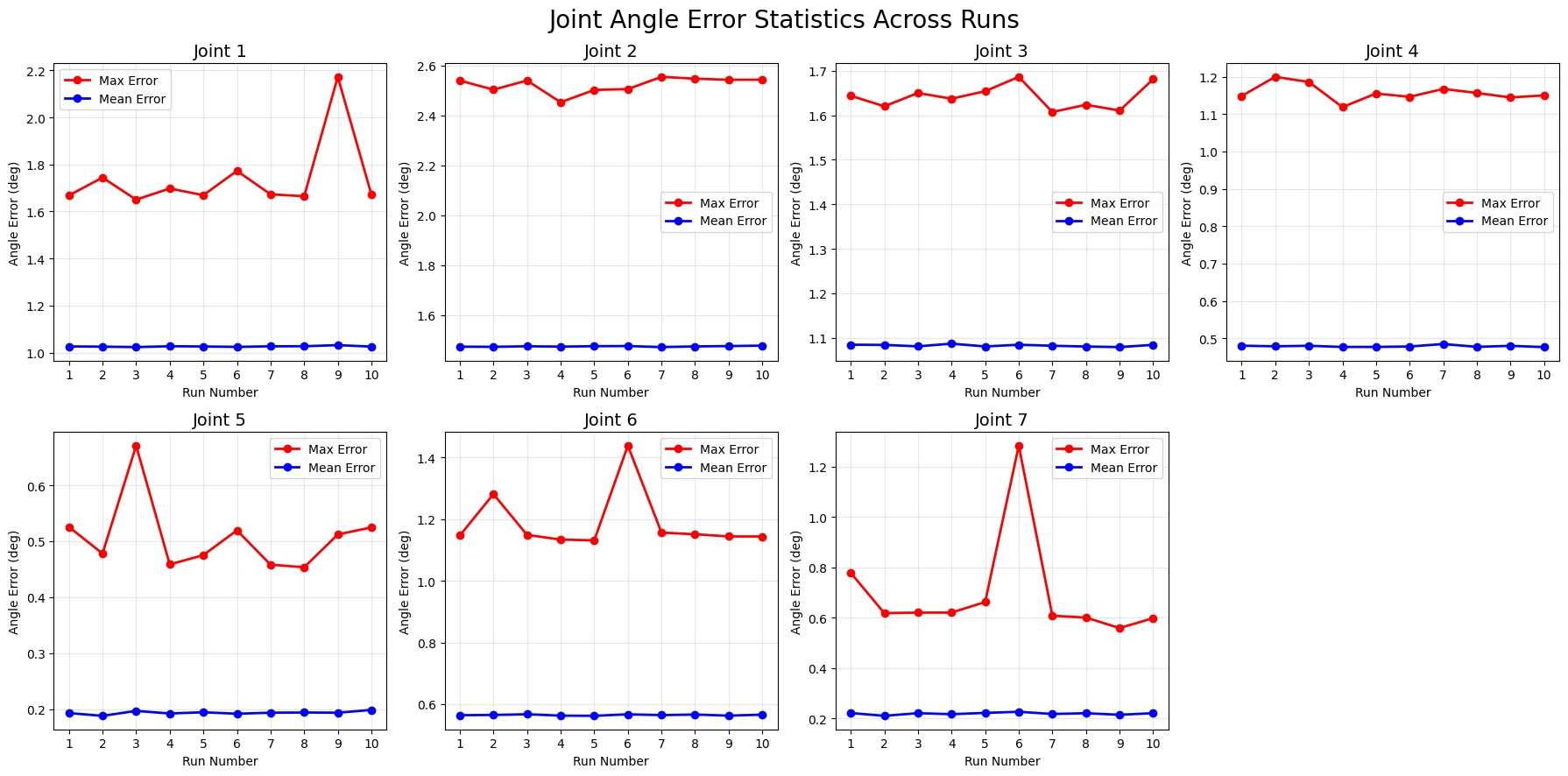
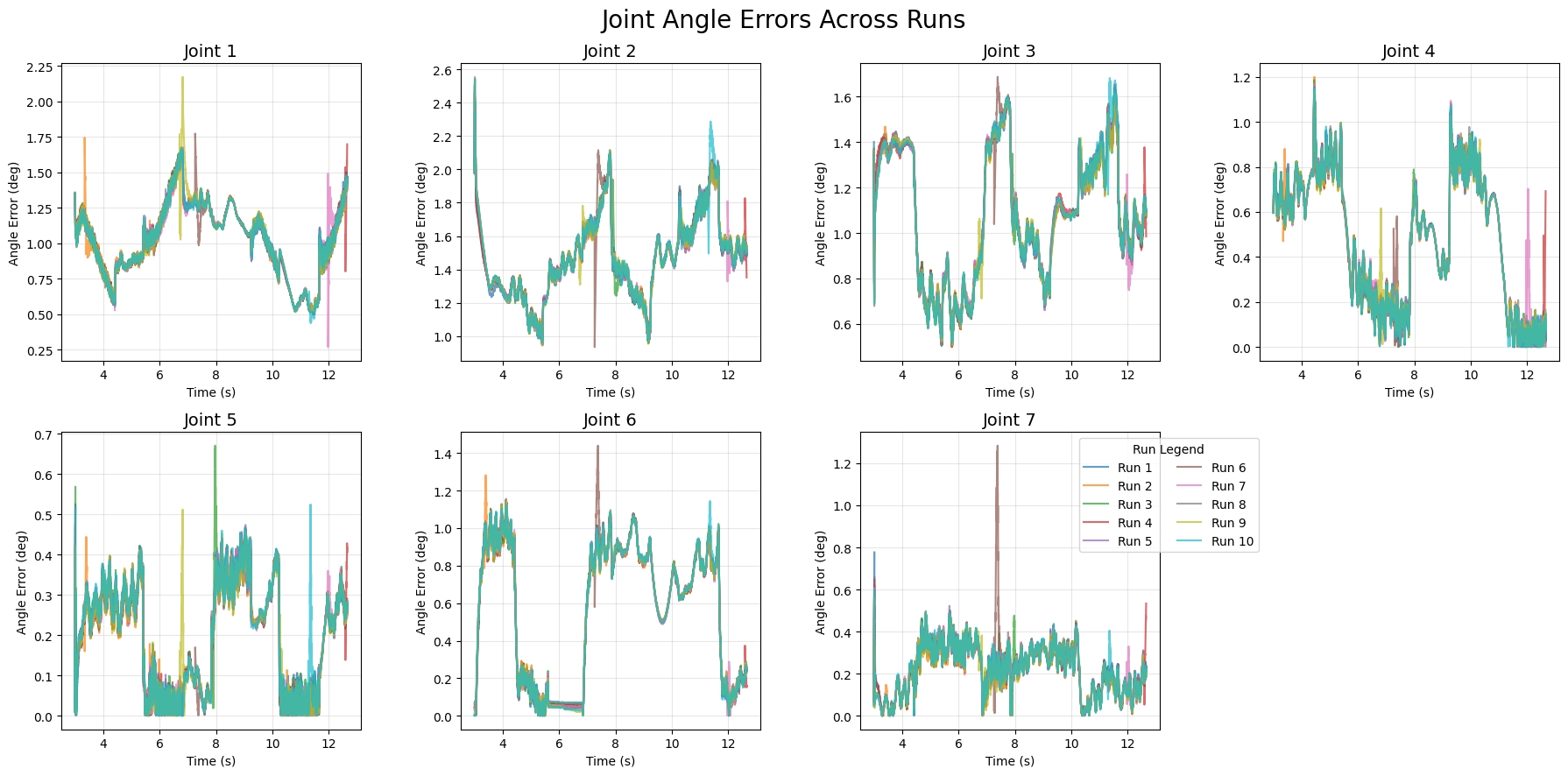
enduable test results demo
System Optimization
Three-Core Enhancement Strategy:
- Fail-Safe Mechanism: Collision detection triggering 10ms emergency stop
- Computational Efficiency: optimized code achieving 1kHz control frequency
Strategic Recommendations:
- Engineering: Implement fault injection testing for failure mode analysis
- Collaboration: Establish knowledge-sharing platform for URDF optimization